در تاریخچه اکتشافات فضایی، دستیابی به فناوریهایی که امکان انجام مأموریتها با حداقل نظارت انسانی را فراهم میکنند، یک نقطه عطف به شمار میرود. جدیدترین پیشرفت در این زمینه، استفاده از هوش مصنوعی برای کنترل رباتها در محیطهای فضایی است که برای نخستین بار در ایستگاه فضایی بینالمللی (ISS) به کار گرفته شده است. این فناوری به رباتهای فضایی امکان میدهد با سرعت و دقت بیشتری در فضا حرکت کنند و به صورت خودکار مسیرهای پیچیده را شناسایی کنند.
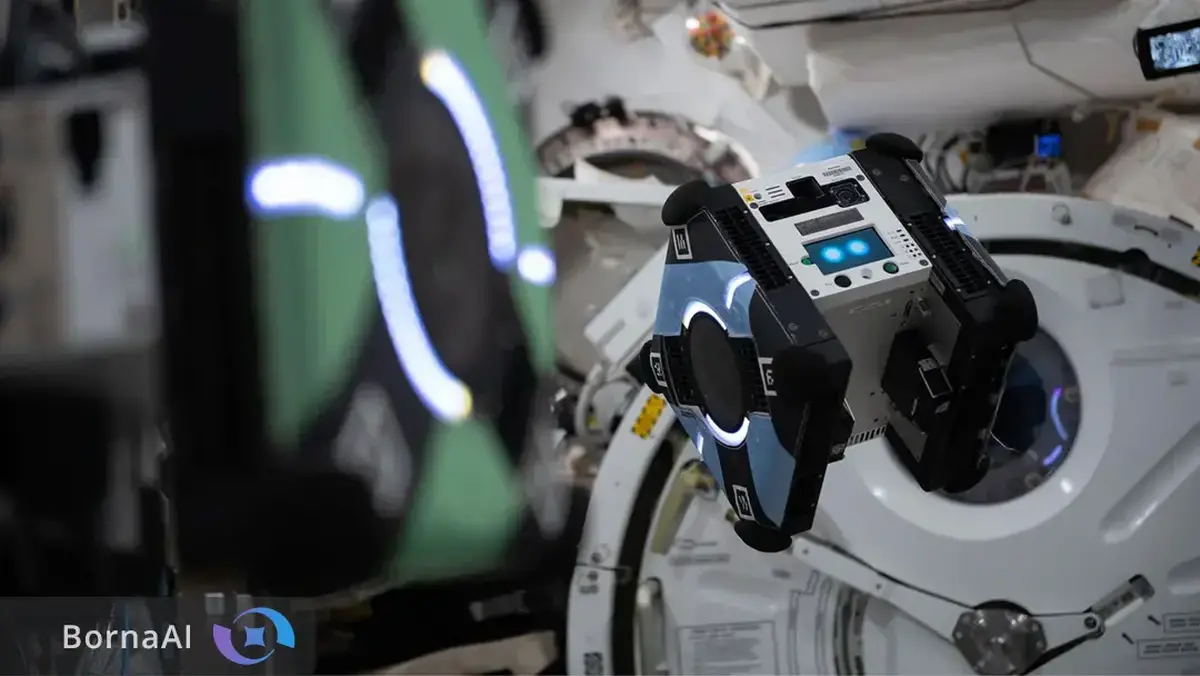
پژوهشگران دانشگاه استنفورد موفق به عملیاتی کردن یک سیستم کنترل مبتنی بر یادگیری ماشین در ایستگاه فضایی بینالمللی شدند. این سیستم به ربات Cube shaped به نام Astrobee اجازه میدهد بدون نیاز به دخالت فضانوردان در محیطهای پیچیده ISS حرکت کند. این ربات که به اندازه یک توستر است، اکنون قادر به برنامهریزی حرکتی مستقل با استفاده از هوش مصنوعی شده است. این دستاورد، نقطه عطفی در رباتیک فضایی به شمار میرود و امکان مأموریتهایی با حداقل کنترل انسانی را فراهم میکند.
محیط داخلی ایستگاه فضایی پیچیده و فشرده است و شامل قفسههای ذخیرهسازی و تجهیزات آزمایشی میشود. روشهای سنتی برنامهریزی حرکتی در زمین در فضا کارایی لازم را ندارند. تیم تحقیقاتی یک سیستم بهینهسازی مبتنی بر برنامهریزی محدب طراحی کرد که مسیرهای امن را شناسایی میکند. هوش مصنوعی به عنوان شتابدهندهای برای تسریع فرآیند عمل میکند و به ربات اجازه میدهد مسیرهای پیچیده را به صورت ایمن و سریع طی کند.
آزمایشها در مرکز پژوهشی ناسا و ایستگاه فضایی انجام شد و نتایج نشان داد که سرعت حرکت ربات بین ۵۰ تا ۶۰ درصد افزایش یافته است. اکنون این سیستم در سطح آمادگی فناوری ۵ طبقهبندی شده است که نشاندهنده قابلیت استفاده آن در محیطهای عملیاتی واقعی است. با افزایش مأموریتهای فضایی و فاصله رباتها از زمین، خودمختاری رباتها ضروری خواهد بود.
این دستاورد نمایانگر موفقیت کنترل مبتنی بر یادگیری ماشین در ایستگاه فضایی است و میتواند به توسعه رباتهای فضایی کاملاً مستقل و کارآمد کمک کند. آینده رباتیک فضایی به سمت خودمختاری هوشمند و کاهش وابستگی به کنترل انسانی پیش میرود.